  |
|
|
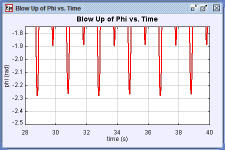
This simulation uses Easy Java Simulations (Ejs) to model the problem of a damped, driven pendulum. The equation of motion for such a pendulum can be written in terms of the angle φ by considering the net torque on the pendulum bob:
m L2 φ-double dot = − mgL sin (φ) − bL φ-dot + LF cos (ωt),
where m is the mass of the pendulum bob, L is the length of the pendulum, b is the damping coefficient, F is the driving force, and ω is the frequency of the driving force. This equation can be written in terms of φ-double dot as [1]:
φ-double dot = − ω0˛ sin (φ) − 2β φ-dot + ω0˛ γ cos (ωt),
where ω0 = (g/L)˝ is the natural frequency of the pendulum, β = b/2mL is the damping parameter, and γ = F/mg is the drive strength parameter (the ratio of the driving force to the gravitational force).
The simulation allows the user to change the initial angle, φ, the initial angular velocity, φ-dot, the damping parameter, β, and the drive strength parameter, γ. The pendulum's natural frequency is set at ω0 = 2π*1.5 rad/sec and the driving frequency is set at ω = 2π*1.0 rad/sec.
These parameters are chosen to allow exploration of the period-doubling cascade route to chaos in the damped, driven pendulum. This simulation was created to parallel the discussion in Chapter 12 of J. R. Taylor's Classical Mechanics textbook.
[1] J. R. Taylor, Classical Mechanics, Chapter 12, University Science Books (2004).