 |
|
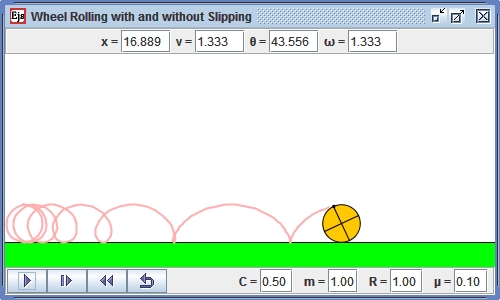
The EJS Slipping and Rolling Wheel Model shows the motion of wheel rolling on a floor subject to a frictional force as determined by the coefficient of friction μk. The simulation allows the user to change the initial translational and rotational velocities of the wheel, v and ω, and the mass, radius, and mass distribution, R, m, and C of the wheel. By controlling these variables, the dynamics of the wheel can be changed to show the sliding, then rolling without slipping, of the wheel.
The following EJS models show examples of translation and rotation. These models are listed in order of EJS programming complexity.